Структурная схема асу предприятия. Структура и структурные схемы асу. Иерархическая трехуровневая структура АСУ ТП
СТРУКТУРНАЯ СХЕМА И ПРИНЦИП РАБОТЫ АСУ
Структурная схема линии приготовления маргарина, на которой показан её состав, включая исполнительные устройства и функционально важные элементы конструкции, приведена на рис. 1.
Рис. 1.
Процесс начинается с набора продукта на жировые весы из баков дезодорированного жира по 12 линиям и на водно-молочные весы по 4 линиям. Оператор вводит рецепты для обоих весов, то есть указывает, по какой линии и какое количество продукта должно быть набрано на весы. После того как набор на весы закончен, происходит последовательная перекачка жировых и водно-молочных компонентов в смеситель. Перекачка возможна только при пустом принимающем баке. Перекачка идёт до опорожнения весов. После этого начинается набор на весы другой партии компонентов. В смесителях происходят подогрев, равномерное перемешивание продукции и перекачка её в рабочий бак. Если в ходе перекачки уровень продукта в рабочем баке достигает 95%, процесс перекачки приостанавливается. Из рабочего бака продукт с помощью насоса высокого давления подаётся через охладитель, где происходит кристаллизация маргарина, и декристаллизатор на фасовочную машину.
СОСТАВЛЕНИЕ ФУНКЦИОНАЛЬНОЙ СХЕМЫ И ОПИСАНИЕ ОСНОВНЫХ ФУНКЦИОНАЛЬНЫХ УЗЛОВ АСУ

Рис. 2.
По структурным схемам (рис.1, 2) составим функциональную схему АСУ.

Рис. 3.
МП - микропроцессор; ЦАП - цифро-аналоговый преобразователь; К - клапан; Н - насос; СМ - смеситель; РБ - рабочий бак; ДУ - датчик уровня; ДД- датчик давления; ДТ- датчик температуры; ДВ - датчик веса; ДВЛ - датчик влажности; КМ - коммутатор; АЦП - аналого-цифровой преобразователь.
Рис. 4.
Используется в качестве устройства контроля за ТП.
Центральный процессор:
AMD Athlon 64 X2 6000+ BOX, ядро Windsor, частота 3000 МГц, Socket AM2, кеш L2 2048 Кб. Средний срок службы - 100000 ч.
Материнская плата:
Gigabyte GA-MA790X-DS4, AMD 790X, PCIe, PCI, 4x DDR2533/667/800, SLI/CrossFire. Средний срок службы - 70080 ч.
Жесткий диск: Seagate Barracuda ST3500320AS 500 Гб, SATA II, 7200 об./мин, 16МБ. Средний срок службы - 70080 ч.
Жидкокристаллический монитор:
Монитор 18,5" LCD Acer E-Machines E190HQVB, 16:9 HD, 5ms, 5000:1. Средний срок службы - 60000 ч.
2) Микропроцессор SIMATIC S7-300 - CPU 315-2 DP - PROFIBUS
Используется в качестве модуля центрального процессора.
Фирма: Siemens
Рис. 5. Микропроцессор SIMATIC S7-300 - CPU 315-2 DP - PROFIBUS

Характеристики:
1. Центральный процессор для выполнения программ среднего и большого объема.
2. Высокая производительность.
3. Встроенный интерфейс ведущего/ ведомого устройства PROFIBUS DP, обслуживание систем распределенного ввода-вывода на основе PROFIBUS DP; поддержка интерфейса MPI.
4. Рабочая встроенная память объемом 128 Кбайт, RAM (приблизительно 43 K инструкций); загружаемая память - ММС 8 МБайт.
5. Гибкие возможности расширения; подключение до 32 модулей S7-300 (4-рядная конфигурация).
6. Входное напряжение: 20.4 - 28.8 В; потребляемый ток: от источника питания - 800 мА, потребляемая мощность - 2,5 Вт.
7. ЦПУ/время выполнения: логических операций - 0,1 мкс, операций со словами - 0,2 мкс, арифметических операций с фиксированной точкой - 2 мкс, арифметических операций с плавающей точкой - 3 мкс.
8. Встроенные коммуникационные функции: PG/OP функции связи, обмен глобальными данными через MPI, функции стандартной S7 связи, S7 функции связи (только сервер)
9. Системные функции: центральный процессор поддерживает широкий спектр функций диагностики, настройки параметров, синхронизации, аварийной сигнализации, измерения временных промежутков и т.д.
10. Средний срок службы - 70080 ч.
3) Высокоскоростной ЦАП/АЦП c поддержкой SM 321
Используется в качестве преобразователя сигналов из аналогового в цифровой и наоборот.
Фирма: Siemens
Рис. 6. Высокоскоростной ЦАП/АЦП

Характеристики:
1. Кол-во входов - 32
2. Номинальное входное напряжение - DC 24V
3. Поканально программируемый коэффициент усиления
4. Автокалибровка
5. Общий потребляемый ток - 35 mА
6. Потребляемая мощность - 5,5W
7. Программируемая схема запуска
8. 16-разрядный счётчик (10 МГц)
9. Выходное напряжение 10 В
10. Средний срок службы - не менее 87600 ч.
4) Датчик температуры с унифицированным выходным сигналом Метран-280-1
Используется в качестве измерителя температуры смеси.
Фирма: Метран
Рис. 7. Датчик температуры
Характеристики:
1. Диапазон преобразуемых температур: -50…200 °С
2. Выходной сигнал 4-20 мА/HART
3. Цифровая передача информации по HART-протоколу
4. Дистанционные управление и диагностика
5. Гальваническая развязка входа от выхода
6. Повышенная защита от электромагнитных помех
7. Минимальный поддиапазон измерений: 25 °С
8. Электронный фильтр 50/60 Гц
9. Питание: 18 - 42 В постоянного тока
10. Мощность: 1,0 Вт
11. Межповерочный интервал - 1года
12. Средний срок службы - не менее 43800 ч.
5) Датчик уровня Rosemount 5300
Используется в качестве измерителя уровня заполнения в смесителе.

Фирма: Метран
Рис. 8. Датчик уровня
Характеристики:
1. Измеряемые среды: жидкие и сыпучие
2. Диапазон измерений: от 0,1 до 50 м
3. Выходные сигналы: 4F20 мА с цифровым сигналом на базе протокола HART или Foundation™ Fieldbus
4. Наличие взрывозащищенного исполнении
5. Рабочая температура: до 150°C (302°F)
6. Потребление тока в режиме ожидания: 21 мА
7. Давление процесса: от 0,1 до 34,5 МПа;
8. Относительная влажность окружающей среды: до 100%
9. Степень защиты от внешних воздействий: IP 66, IP67 по ГОСТ 14254
10. Межповерочный интервал - 1 год
11. Средний срок службы - 43800 ч.
6) Датчик давления Rosemount 2088
Используется в качестве измерителя давления в рабочем баке.
Фирма: Метран
автоматический функциональный технологический маргарин

Рис. 9.
Характеристики:
1. Верхние пределы измерений от 10,34 до 27579,2 кПа
2. Основная приведенная погрешность измерений ±0,075%; ±0,1%
3. Выходные сигналы 4D20 мА/НАRТ, 1D5 В/НАRТ, 0,8D3,2 В/НАRТ
4. Перенастройка диапазонов измерений 20:1
5. Дополнительно: ЖК индикатор, кронштейны, вентильные блоки
6. Диапазон температур окружающей среды от 40 до 85°С; измеряемой среды от 40 до 121°С
7. Время отклика датчика не более 300 мс
8. Нестабильность характеристик ±0,1% от Pmax за 1 год
11. Средний срок службы - 61320 ч.
7) Датчик веса Omron-D8M
Используется в качестве измерителя веса продукта в смесителе.
Фирма: Omron

Рис. 10.
Характеристики:
2. Цифровой выход
3. Рабочий диапазон температур -10…+120°С
4. Верхний предел измерения: 60 МПа:
5. Номинальное усилие: 200 Н
6. Полная приведенная погрешность, не более: 5%
7. Максимальный потребляемый ток, не более:
8. Сопротивление мостовой схемы входное, Ом - 450±25,0
9. Сопротивление мостовой схемы выходное, Ом - 400±4,0
10. Межповерочный интервал - 2 года
11. Средний срок службы - 52560 ч.
8) Датчик влажности Omron-4000-04
Используется в качестве измерителя влажности в рабочем баке.
Фирма: Omron
Рис. 11.
Характеристики:
1. Диапазон измеряемой относительной влажности: 0 - 100%
2. Выходной сигнал - напряжение
3. Время отклика - 15 с
4. Номинальный выходной ток - 0,05мА
5. Дипазон выходного напряжения: 0,8 - 3,9В
7. Корпус SIP 1.27 мм
8. Межповерочный интервал - 2 года
9. Средний срок службы - 43800 ч.
Используется в качестве исполнительного устройства для дозирования компонентов в системе.
Фирма: КЗМЭМ

Рис. 12.
Характеристики:
1. Тип корпуса - проходной, литой (латунь)
2. Рабочее давление: 0 - 0,1МПа
3. Присоединение муфтовое
5. Потребляемая мощность - 0,15Вт
6. Число срабатываний - не менее 500000
7. Время срабатывания - не более 1 с
8. Средний срок службы - 26280 ч.
Используется в качестве устройства для перекачки компонентов в системе.
Фирма: Grundfos

Рис. 13.
Характеристики:
1. Рабочий объем от 0,12 до 0,34 см 3 /об
2. Рабочее давление до 70 МПа
3. Частота вращения от 500 до 3600 об/мин
Используется в качестве устройства для смешивания компонентов в системе.
Фирма: «Воплощение»

Рис. 14.
Характеристики:
1. Масса - не более 215 кг
2. Рабочая вместимость бака - 156 л
3. Производительность техническая - не более 950 л/ч
4. Установленная мощность - не более 3 кВт
5. Частота - 50 Гц
6. Средний срок службы - 35040 ч.
12) Бак из нержавеющей стали
Используется в качестве устройства для приготовления продукта.
Фирма: Unical
Рис. 15.
Характеристики:
1. Объем бака - 300 л
2. Максимальная рабочая температура - 120 C
3. Максимально рабочее давление - 10 бар
4. Средний срок службы - 26280 ч.
1. Иерархическая трехуровневая структура АСУ ТП
Чаще всего распределенные АСУ ТП имеют трехуровневую структуру. Пример структурной схемы комплекса технических средств такой системы приведен на рисунке 1.
На верхнем уровне с участием оперативного персонала решаются задачи диспетчеризации процесса, оптимизации режимов, подсчета технико-экономических показателей производства, визуализации и архивирования процесса, диагностики и коррекции программного обеспечения системы. Верхний уровень АСУ ТП реализуется на базе серверов, операторских (рабочих) и инженерных станций.
На среднем уровне - задачи автоматического управления и регулирования, пуска и останова оборудования, логико-командного управления, аварийных отключений и защит. Средний уровень реализуется на основе ПЛК.
Нижний (полевой) уровень АСУ ТП обеспечивает сбор данных о параметрах технологического процесса и состояния оборудования, реализует управляющие воздействия. Основными техническими средствами нижнего уровня являются датчики и исполнительные устройства, станции распределенного ввода/вывода, пускатели, концевые выключатели, преобразователи частоты.
Рис.1
2. Уровень ввода/вывода (полевой уровень)
Входные сигналы от датчиков и управляющие воздействия на исполнительные механизмы могут подаваться непосредственно на ПЛК (поступать от ПЛК). Однако если ТОУ имеет значительную территориальную протяженность, это потребует длинных кабельных линий от каждого устройства к ПЛК. Такое техническое решение может оказаться не рациональным по двум причинам:
- высокая стоимость кабельной продукции;
- возрастание уровня электромагнитных помех с ростом длины линий.
Более рациональным в такой ситуации является использование станций распределенной периферии, располагающихся в непосредственной близости к датчикам и исполнительным механизмам. Такие станции содержат необходимые модули ввода и вывода, а также интерфейсные модули для подключения к ПЛК через цифровую полевую шину (например, с использованием протокола Profibus DP, или Modbus RTU). Цифровая передача всех сигналов осуществляется по одному кабелю с высоким уровнем помехозащищенности. К полевой шине могут непосредственно подключаться также так называемые интеллектуальные датчики и исполнительные устройства (имеющие в своем составе контроллеры и другие блоки, обеспечивающие преобразование сигнала в цифровую форму и реализующие обмен данными через полевую шину).
Упрощенная схема ввода/вывода с использованием станции распределенной периферии приведена на рисунке 2. Полевая шина Profibus DP (Process field bus Distributed Periphery) позволяет соединить до 125 устройств, до 32 на сегмент (ПЛК, станций распределенной периферии, интеллектуальных датчиков и исполнительных устройств). Станция распределенной периферии состоит из трех основных компонент:
- базовой панели (Baseplate), на которую в специальные слоты устанавливают модули ввода/вывода и интерфейсные модули, или специальной профильной рейки, на которую крепятся модули;
- модулей ввода/вывода (I/O Modules);
- интерфейсных модулей (Interface modules), обеспечивающих обмен данными с ПЛК через цифровую полевую шину.

Рис. 2
Количество слотов под установку модулей может быть различным (чаще всего от 2 до 16). Крайний левый слот обычно используется для установки интерфейсного модуля. Блок питания может быть установлен на базовой панели или может быть использован отдельный (внешний) блок. Внутри базовой панели проходят две шины: одна служит для подачи питания на установленные модули; другая - для информационного обмена между модулями.
На рисунке 3 приведено фото узла распределенного ввода/вывода модели 2500 фирмы Eurotherm. На базовой панели расположено 8 модулей ввода/вывода и интерфейсный модуль Profibus DP, блок питания - внешний. На рисунке 4 приведено фото станции распределенной периферии фирмы Siemens ET 200M. На базовой панели 6 сигнальных модулей (модулей ввода/вывода) 1 интерфейсный модуль Profibus DP (крайний слева) и блок питания.
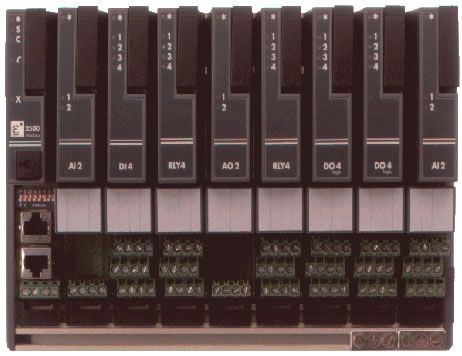
Рис.3

Рис.4
2.1 Сигнальные модули (модули ввода/вывода)
Модули ввода/вывода бывают 4 типов:
1) Сигнальные модули аналогового ввода (AI, analogue input). Они принимают от датчиков, подключенных к его входам, электрические сигналы унифицированного диапазона, например:
- 0-20 или 4-20 mA (токовый сигнал);
- 0-10 V или 0-5 V (потенциальный сигнал);
- сигналы от термопар (TC) измеряются миливольтами;
- сигналы от термосопротивлений (RTD).
Допустим, у нас есть датчик давления с диапазоном измерений 0-6 бар и токовым выходом 4-20 mA. Датчик измеряет давление P, которое в данный момент равно 3 бар. Так как датчик линейно преобразует значение измеряемого давления в токовый сигнал, то на выходе датчика будет:
Вход сигнального модуля AI, настроенный на те же диапазоны (4-20 mA и 0-6 бар), принимает сигнал 12 mA и делает обратное преобразование:
Соответствие диапазона электрического сигнала между входом модуля и выходом подключенного к нему датчика обязательно для корректной работы системы.
2) Сигнальные модули дискретного ввода (DI, discrete input). Принимают от датчиков дискретный электрический сигнал, который может иметь только два значения: или 0 или 24 V (в редких случаях 0 или 220 V). Вход модуля DI также может реагировать на замыкание/размыкание контакта в подключенной к нему цепи. К DI обычно подключают датчики контактного типа, кнопки ручного управления, статусные сигналы от систем сигнализации, приводов, позиционирующих устройств и т.д.
Допустим, у нас есть насос. Когда он не работает, его статусный (выходной) контакт разомкнут. Соответствующий дискретный вход сигнального модуля DI находится в состоянии “0”. Как только насос запустили, его статусный контакт замыкается, и напряжение 24 V идет на клеммы входа DI. Модуль, получив напряжение на дискретном входе, переводит его в состояние “1”.
3) Сигнальные модули дискретного вывода (DO, discrete output). В зависимости от внутреннего логического состояния выхода (“1” или “0”) устанавливает на клеммах дискретного выхода напряжение 24 V или 0 V соответственно. Есть вариант, когда модуль в зависимости от логического состояния выхода просто замыкает или размыкает внутренний контакт (модуль релейного типа). Модули DO могут управлять приводами, отсечными клапанами, зажигать светосигнальные лампочки, включать звуковую сигнализацию и т.д.
4) Сигнальные модули аналогового вывода (АО, analogue output) используются для подачи токового управляющего сигнала на исполнительные механизмы с аналоговым управляющим сигналом. Допустим, регулирующий клапан с управляющим входом 4-20 mA необходимо открыть на 50 %. В этом случае на соответствующий выход АO, к которому подключен вход клапана, подается ток I вых:
Под действием входного тока 12 mA клапан переходит на 50 % открытия.
Соответствие диапазона электрического сигнала между выходом модуля и входом подключенного к нему исполнительного механизма обязательно. Модуль ввода/вывода также характеризуются канальностью – числом входов/выходов, а, следовательно, и количеством сигнальных цепей, которые к нему можно подключить. Например, модуль AI4 - это четырехканальный модуль аналогового ввода. К нему можно подключить 4 датчика. DI16 - модуль дискретного ввода, имеющий шестнадцать каналов. К нему можно подключить 16 статусных сигналов от технологических агрегатов.
В современных системах расположение модулей ввода/вывода на базовой плате строго не регламентировано, и их можно устанавливать в произвольном порядке. Однако один или несколько слотов, как правило, зарезервированы под установку коммуникационного модуля. Иногда возможна установка сразу двух коммуникационных модулей, работающих параллельно. Это делается для повышения отказоустойчивости системы ввода/вывода.
Одним их жестких требований, предъявляемых к современным подсистемам ввода/вывода, является возможность “горячей” замены модулей без отключения питания (функция hot swap).
Коммуникационные модули обеспечивают обмен данными между ПЛК, станциями распределенной периферии, интеллектуальными датчиками и исполнительными устройствами. Модули поддерживают один из коммуникационных протоколов:
- Profibus DP;
- Profibus PA;
- Modbus RTU;
- HART;
- CAN и др.
Обмен информацией, как правило, осуществляется с использованием механизма ведущий-ведомый (master-slave). Только ведущее устройство на шине может инициировать обмен данными. Ведомые устройства пассивно прослушивают все данные, идущие по шине, и только в случае получения запроса от ведущего устройства отправляют обратно ответ. Каждое устройство на шине имеет свой уникальный сетевой адрес, необходимый для однозначной идентификации. Узлы ввода/вывода, как правило, являются ведомыми устройствами, в то время как контроллеры - ведущими.
На рисунке 5 показана цифровая полевая шина, объединяющая один контроллер (с монитором) и четыре узла ввода/вывода. Каждое устройство, подключенное к шине, имеет свой уникальный адрес. Пусть, например, ПЛК с адресом 1 хочет считать показание датчика давления. Датчик подключен к станции распределенной периферии с сетевым адресом 5, к модулю AI, расположенному в слоте 6, входной канал 12. Тогда ПЛК формирует и отправляет по шине запрос следующего содержания:

Рис. 5
Каждый узел прослушивает все запросы на шине. Узел 5 узнает, что запрос адресован ему, считывает показание датчика и формирует ответ в виде следующего сообщения:
Контроллер, получив ответ от ведомого устройства, считывает поле данных с датчика и выполняет соответствующую обработку. Пусть, например, после обработки данных ПЛК вырабатывает управляющий сигнал на открытие клапана на 50 %. Управляющий вход клапана подключен к второму каналу модуля AO, расположенного в слоте 3 узла 7. ПЛК формирует команду следующего содержания:
Узел 7, прослушивая шину, встречает адресованную ему команду. Он записывает уставку 50 % в регистр, соответствующий слоту 3, каналу 2. При этом модуль AO формирует на выходе 2 необходимый электрический сигнал. После чего узел 7 высылает контроллеру подтверждение успешного выполнения команды.
Контроллер получает ответ от узла 7 и считает, что команда выполнена. Это всего лишь упрощенная схема взаимодействия контроллера с узлами ввода/вывода. В реальных АСУ ТП, наряду с рассмотренными выше, используется множество диагностических, управляющих и сервисных сообщений. Хотя сам принцип “запрос-ответ” (“команда-подтверждение”), реализованный в большинстве полевых протоколов, остается неизменным.
Напомним еще раз, что наряду с рассмотренной выше схемой ввода/вывода в АСУ ТП могут применяться схемы ввода/вывода через сигнальные модули, установленные непосредственно в слоты (или на профильную рейку) ПЛК (без использования станций распределенной периферии).
2.2 Обработка аналоговых сигналов в процессе ввода в контроллер
Для ввода аналогового сигнала в контроллер и его последующей обработки, он должен быть оцифрован, т.е. преобразован в цифровой код. Процесс обработки сигнала от аналогового датчика до использования в контроллере схематически показан на рисунке 6.

Рис.6
Схема обработки аналогового сигнала при вводе в контроллер
Сигналы от датчиков доводятся до нормированного уровня (4 – 20 mA, 0 – 10 V) нормирующими преобразователями (НП) и проходят этап аналоговой фильтрации. Аналоговые фильтры позволяют устранить высокочастотные шумы, которые могут быть вызваны, например, электромагнитными помехами при передаче сигнала по кабелю.
Необходимо отметить, что сигнал должен быть отфильтрован от высокочастотных шумов до цифровой обработки в контроллере. Это является необходимым условием правильного выбора периода дискретизации при вводе сигнала. Дело в том, что для адекватного восстановления исходного аналогового сигнала по дискретным данным, частота дискретизации должна не менее чем в два раза превышать наивысшую частоту в спектральном разложении вводимого сигнала (спектральный состав может быть получен в результате разложения сигнала в ряд Фурье). При более низкой частоте дискретизации в восстановленном сигнале появится ложная составляющая (так называемая псевдочастота), которую невозможно детектировать и устранить на этапе цифровой обработки. Наличие высокочастотного шума потребует очень высокой частоты дискретизации (частоты опроса датчика), что будет неоправданно загружать контроллер.
Отфильтрованные сигналы от датчиков поступают на аналоговый мультиплексор, основное назначение которого – последовательное подключение сигналов от N датчиков к устройству выборки-хранения (УВХ) и аналого-цифровому преобразователю (АЦП) для дальнейшей обработки. Такая схема позволяет существенно снизить общую стоимость системы ввода за счет применения только одного УВХ и АЦП на все каналы аналогового ввода. УВХ запоминает мгновенное значение сигнала в момент подключения датчика и удерживает его постоянным на своем выходе на время преобразования в АЦП.
В контроллере введенный цифровой сигнал проверяется на физическую достоверность и, при необходимости, проходит этап цифровой (программной) фильтрации.
Является схема управления в режимесбора данных
. При этом подсоединяется к технологическому процессуспособом, выбранным инженером-технологом.
Подсоединение осуществляетсяпосредством сопряжения с объектом (УСО). Измеря-емые величиныпреобразуются в цифровую форму. Эти величины по соответст-вующим формулампреобразуются в единицы. Например, для вычис-лениятемпературы, замеряемой с помощьютермопары,можетиспользоватьсяформула T = A * U2 + B * U + C ,гдеU–напряжениенавыходетермопары;A, B и C – коэффициенты. Результатывычислений регистрируются устройствами вывода для последующего изучения технологическогопроцесса в различных условиях его прохождения. На основе этого можно построитьили уточнить математическую модель управляемого процесса.
Данный режим неоказывает прямого воздействия натехнологический процесс. Здесь нашел осторожный подход к внедрению методовуправления в АСУТП. Однако данная схема используется как одна из обязательныхподсхем управления в других более сложных схемах управлениятехнологическимипроцессами.
В
данной схеме АСУТП работаетв темпе выполнения технологического процесса. Контур управления разомкнут, т.е.выходы АСУТП не связаны с органами, управляющими технологическими процессами.Управляющие воздействия осуществляются оператором-технологом
,получающимрекомендацииотЭВМ.
Все необходимыеуправляющие воздействия вычисляются ЭВМ всоответствии с моделью технологического процесса, результаты вычисленийпредоставляются оператору в печатном виде (или в виде сообщений на дисплее).Оператор управляет процессом, изменяя установки .
Регуляторыявляются средствами поддержания оптимального управления технологическимпроцессом. Оператор выполняет роль следящего и управляющего , усилиякоторого АСУТП непрерывно и безошибочно направляетнаоптимизацию выполнения технологическогопроцесса.
Основнойнедостаток этой схемы управления заключается в присутствиичеловека в цепи управления. При большом числевходных и выходных переменных такая схема управления не может применяться из-заограниченных психофизических возможностей человека. Однако управление этоготипа имеет и преимущества. Оно удовлетворяет осторожного подхода кновым методам управления.
Режим советчика обеспечивает хорошие возможности дляпроверки новых моделей технологических процессов. АСУТП может отслеживатьвозникновение аварийных ситуаций, так чтооператор имеет возможность уделять больше внимания работе с установками, приэтом АСУТП может следить забольшимчисломаварийныхситуаций,чемоператор.
Супервизорноеуправление.
В
этой схеме АСУТП используется в замкнутомконтуре, т.е.установкирегуляторамзадаютсянепосредственносистемой.
- Управлениеавтоматизированной транспортно-складской . В такой системе ЭВМ выдаетадреса стеллажных ячеек, а система локальной автоматики кранов-штабелёров отрабатываетперемещение их в соответствии с этими адресами.
- Управлениеплавильными печами. ЭВМ вырабатывает значения уставок для управления режимамиработы электрических печей, а локальная автоматика по командам ЭВМ управляетпереключателями трансформаторов.
- Станки с числовымпрограммным управлением.
Непосредственное цифровое управление.
В
режиме непосредственного цифрового управления
(НЦУ) сигналы,используемые для приведения в действие управляющих органов, поступают из АСУТП,а регуляторы вообще исключаются из системы управления. Регуляторы – этоаналоговые вычислители, которые решают одноуравнение в реальном масштабе времени, например такого вида:
где y может обозначать положениеклапана; k0, k1, k2, k3 – параметры настройки,благодаря которым регулятор можно настроить на работу в различных режимах;X - разность междуизмеряемой величиной и уставкой. Если X не =0, то для выведения процесса на заданный режим требуетсяперемещение управляющего органа.
Если регуляториспользует для своей работы два первых члена уравнения, то он называется .Если используются три первых члена, то регулятор - пропорционально-интегральный ,и если - все члены уравнения, то регулятор - пропорционально-интегрально-дифференциальный .
Концепция НЦУпозволяет заменить регуляторы с задаваемой уставкой. Рассчитываются реальныевоздействия, которые в виде соответствующих сигналов передаются непосредственнона управляющие органы. Схема НЦУ показана на рисунке:
Введены обозначения:
УО – управляемый объект
Д – датчик.
Уставкивводятся в АСУ оператором или ЭВМ, выполняющей расчеты по оптимизации процесса.Оператор должен иметь возможность изменять уставки, контролировать некоторыеизбранные переменные, изменять диапазоны допустимого изменения измеряемыхпеременных, изменять параметры настройки, а также должен иметь доступ куправляющей программе. Одно из главных преимуществ режима НЦУ заключается ввозможности изменения алгоритмов управления путем внесенияизменений в управляющую программу. Основнойнедостаток схемы непосредственного цифрового управления – возможность системы при отказе ЭВМ.
Лекция 9
При разработке проекта автоматизации в первую очередь необходимо решить, с каких мест те или иные участки объекта будут управляться, где будут размещаться пункты управления, операторские помещения, какова должна быть взаимосвязь между ними, т.е. необходимо решить вопросы выбора структуры управления. Под структурой управления понимается совокупность частей автоматической системы, на которые она может быть разделена по определенному признаку, а также пути передачи воздействий между ними. Графическое изображение структуры управления называется структурной схемой. Хотя исходные данные для выбора структуры управления и ее иерархии с той или иной степенью детализации оговариваются заказчиком при выдаче задания на проектирование, полная структура управления должна разрабатываться проектной организацией.
В самом общем виде структурная схема системы автоматизации представлена на рисунке 9.1. Система автоматизации состоит из объекта автоматизации и системы управления этим объектом. Благодаря определенному взаимодействию между объектом автоматизации и системой управления система автоматизации в целом обеспечивает требуемый результат функционирования объекта, характеризующийся параметрами х 1 х 2 …х n
Работа комплексного объекта автоматизации характеризуется рядом вспомогательных параметров у 1 , у 2 , ..., y j , которые также должны контролироваться и регулироваться.
В процессе работы на объект поступают возмущающие воздействия f 1 , f 2 , ...,f i , вызывающие отклонения параметров х 1 , х 2 , х n от их требуемых значений. Информация о текущих значениях х 1 , х 2 , х n , y 1 , y 2 , y n поступает в систему управления и сравнивается с предписанными им значениями g j , g 2 ,..., g k , в результате чего система управления вырабатывает управляющие воздействия Е 1 , E 2 , ..., Е m для компенсации отклонений выходных параметров.
Рисунок 9.1 – Структурная схема системы автоматизации
Выбор структуры управления объектом автоматизации оказывает существенное влияние на эффективность его работы, снижение относительной стоимости системы управления, ее надежности, ремонтоспособности и т.д.
В общем случае любая система может быть представлена:
· конструктивной структурой;
· функциональной структурой;
· алгоритмической структурой.
В конструктивной структуре системы каждая ее часть представляет собой самостоятельное конструктивное целое (рисунок 9.1).
В конструктивной схеме присутствуют:
· объект и система автоматизации;
· информационные и управляющие потоки.
В алгоритмической структуре каждая часть предназначена для выполнения определенного алгоритма преобразования входного сигнала, являющегося частью всего алгоритма функционирования системы.
Проектировщик разрабатывает алгоритмическую структурную схему (АСС) объекта автоматизации по дифференциальным уравнениям или графическим характеристикам. Объект автоматизации представляется в виде нескольких звеньев с различными передаточными функциями, соединенными между собой. В АСС отдельные звенья могут не иметь физической целостности, но соединение их (схема в целом) по статическим и динамическим свойствам, по алгоритму функционирования должно быть эквивалентно объекту автоматизации. На рисунке 9.2 дан пример АСС АСУ.

Рисунок 9.2 – Алгоритмическая структурная схема, представленная в виде простых звеньев
В функциональной структуре каждая часть предназначена для выполнения определенной функции.
В проектах автоматизации изображают конструктивные структурные схемы с элементами функциональных признаков. Полные сведения о функциональной структуре с указанием локальных контуров регулирования, каналов управления и технологического контроля приводятся в функциональных схемах (лекция 10).
Структурная схема АСУ ТП разрабатывается на стадии “Проект” при двухстадийном проектировании и соответствует составу системы. В качестве примера на рисунке 9.3 приведена структурная схема управления серно-кислотным производством.

Рисунок 9.3 – Фрагмент структурной схемы управления и контроля серно-кислотным производством:
1 – линия связи с цеховой химической лабораторией; 2 – линия связи с пунктами контроля и управления кислотным участком; 3 – линия связи с пунктом контроля и управления III и IV технологическими линиями
На структурной схеме отображаются в общем виде основные решения проекта по функциональной, организационной и технической структурам АСУ ТП с соблюдением иерархии системы и взаимосвязей между пунктами контроля и управления, оперативным персоналом и технологическим объектом управления. Принятые при выполнении структурной схемы принципы организации оперативного управления технологическим объектом, состав и обозначения отдельных элементов структурной схемы должны сохраняться во всех проектных документах на АСУ ТП.
Таблица 9.1 – Функции АСУ ТП и их условные обозначения на рисунке 9.3
| Условное обозначение | Наименование |
| Контроль параметров Дистанционное управление технологическим оборудованием и исполнительными устройствами Измерительное преобразование Контроль и сигнализация состояния оборудования и отклонения параметров Стабилизирующее регулирование Выбор режима работы регуляторов и ручное управление задатчиками Ручной ввод данных Регистрация параметров Расчет технико-экономических показателей Учет производства и составления данных за смену Диагностика технологических линий (агрегатов) Распределение нагрузок технологических линий (агрегатов) Оптимизация отдельных технологических процессов Анализ состояния технологического процесса Прогнозирование основных показателей производства Оценка работы смены Контроль выполнения плановых заданий Контроль проведения ремонтов Подготовка и выдача оперативной информации в АСУП Получение производственных ограничений и заданий от АСУП |
На структурной схеме показывают следующие элементы:
1. технологические подразделения (отделения, участки, цеха, производства);
2. пункты контроля и управления (местные щиты, операторские и диспетчерские пункты, блочные щиты и т.д.);
3. технологический персонал (эксплуатационный) и дополнительные специальные службы, обеспечивающие оперативное управление;
4. основные функции и технические средства, обеспечивающие их реализацию в каждом пункте контроля и управления;
5. взаимосвязь между подразделениями и с вышестоящей АСУ.
Функции АСУ ТП шифруют и на схеме обозначают в виде чисел. Условные обозначения функций АСУТП на рисунке 9.3 приведены в таблице 9.1.
Структурная схема системы автоматизации выполняется по узлам и включает все элементы системы от датчика до регулирующего органа с указанием места расположения, показывая их взаимосвязи между собой.
АСУ – аббревиатура, которая расшифровывается как Автоматизированные Системы Управления. Ответ на вопрос, что такое АСУ, можно сформулировать следующим образом: это совокупность технических систем и процессов, организационных комплексов и научных методов, которые позволяют обеспечить оптимальное управление сложным техническим процессом или объектом, а также коллективом людей, который имеет одну единую цель.
Вконтакте
Структурная схема АСУ
В структуре любой автоматизированной системы управления можно выделить следующие компоненты:
- Основная часть – включает в себя математическое и информационное обеспечение и техническую часть.
- Функциональна часть – подразумевает конкретные управленческие функции и ряд взаимосвязанных программ.
Системы могут быть элементарными или масштабными и сложными.
Принято различать две структурные разновидности таких систем - автоматизированная система управления техническим процессом (АСУТП) и система организационного управления (АСОУ).
 Различия среди этих систем заключаются в характеристиках объекта, которым система будет управлять. АСУТП выстраиваются для управления сложными техническими объектами, механизмами, аппаратами, машинами. АСОУ призваны контролировать функционирование коллективы людей. Соответственно применению АСУ, будут различаться и способы передачи информации – это могут быть документы или разнообразные физические сигналы.
Различия среди этих систем заключаются в характеристиках объекта, которым система будет управлять. АСУТП выстраиваются для управления сложными техническими объектами, механизмами, аппаратами, машинами. АСОУ призваны контролировать функционирование коллективы людей. Соответственно применению АСУ, будут различаться и способы передачи информации – это могут быть документы или разнообразные физические сигналы.
Существует также аббревиатура САУ – система автоматического управления. Её особенность заключается в том, что она некоторое время может действовать без вмешательства человека. Применяются такие системы для управления отельными небольшими объектами.
Применение и основные функции АСУ
АСУ нашли широкое применение в разнообразных сферах промышленного производства. Основные функции систем сводятся к следующему:

Основные принципы АСУ
Впервые принципы действия автоматизированных систем управления, порядок их разработки и создания были сформулированы В.М. Глушковым.

Информационная база АСУ
Информационной базой АСУ можно назвать всю совокупность информации, размещённой на машинных носителях и необходимых для нормального функционирования системы.
Как правило, вся информационная база подразделяется условно на три сектора – генеральный, производный и оперативный.

Технические характеристики АСУ
Под технической базой АСУ принято понимать все технические средства, которые применяют для сбора, накопления и обработки информации, а также для её отображения и передачи. Сюда же можно отнести и исполнительные узлы системы, которые воздействуют на объект управления.
Основные технические элементы и оборудование АСУ – это электронно-вычислительная техника, которая обеспечивает накопление и обработку всех данных, циркулирующих внутри системы. Такая техника позволяет моделировать производственные процессы и строить предложения для управления.
 Для построения и управления АСУ применяются два типа электронно-вычислительной техники - учётно-регулирующий и информационно-расчётный.
Для построения и управления АСУ применяются два типа электронно-вычислительной техники - учётно-регулирующий и информационно-расчётный.
Информационно-расчётное оборудование находится на высшей иерархической ступени в управленческой системе. Их задачей является решение всех вопросов, связанных с централизованным управлением объектом. Для таких механизмов характерно высокое быстродействие, наличие системы прерываний, переменная длина слова, слоговая обработка вводных данных.
Нижний уровень системы управления, как правило, отдаётся учётно-регулирующим механизмам и оборудованию. Эти механизмы, как правило, размещаются непосредственно на участках или в производственных цехах. В их задачу входит сбор вводных данных от объектов управления и первичная обработка этой информации с последующей передачей её в информационно-расчётное отделение и получением плановой директивной информации. Кроме того, учётно-регулирующая часть оборудования занимается локальными расчётами и вырабатывает управляющие воздействия на объекты управления в случае возникновения отклонений от расчётных функций. Эта часть системы управления имеет хорошо развитую связь с большим количеством источников информации и устройств регулирования.
Механические средства сбора и отображения информации
Если системой предусмотрен сбор и обработка информации с участием человека, в неё включаются различные регистраторы, которые позволяют получать исходные данные непосредственно с рабочих мест. Сюда же относятся всевозможные температурные датчики, таймеры, измерители количества произведённых деталей и прочее подобное оборудование. Монтируются также автоматические фиксаторы отклонений в производственном процессе, которые регистрируют и передают в систему сведения об отсутствии материалов, инструментария, транспортных средств для отправки изготовленных продуктов, а также неправильности в работе станков. Подобная аппаратура устанавливается не только в производственных помещениях, но и на складах для хранения сырья и готовой продукции.
К средствам отображения данных относятся все устройства, позволяющие вывести информацию в наиболее доступном для человека виде. Сюда относятся всевозможные мониторы, табло и экраны, печатающие устройства, терминалы, индикаторы и пр. Эти устройства связаны напрямую с центральным процессором вычислительной машины и могут выдавать информацию либо регламентировано, либо эпизодически – по запросу оператора или же в случае возникновения аварийной ситуации.
В состав технической базы автоматизированных систем управления входят также разнообразные виды оргтехники, контрольно-измерительные и учётные приборы, которые обеспечивают нормальное функционирование основных технических узлов.